👤 自己紹介
あみろう
ロボコン機械設計・操縦・実機調整
チームホビーロボット / KINKI KNIGHTS
和歌山高専で高専ロボコンに参加したことを起点に、キャチロボバトルコンテスト、レスキューロボットコンテスト、ヒト型レスキューロボットコンテスト、CoREへと活動を広げてきました。機械設計を中心に、装飾・外装、自動機構、食品把持、ヒト型ロボット、射出機構、操縦性の改善、実機調整に取り組んでいます。
また、第二種電気工事士、QC検定2級、空気圧装置組立て技能士1級、機械・プラント製図技能士2級、G検定を取得しており、機械・電気・品質管理・AIの知識を横断的に活かせるロボット開発を目指しています。
🦾 ロボット紹介

高専ロボコン(和歌山高専)
出場ロボコン活動のスタート地点となった機体。機械設計の基本と、競技に必要な機構の組み立て・実機調整を体得。
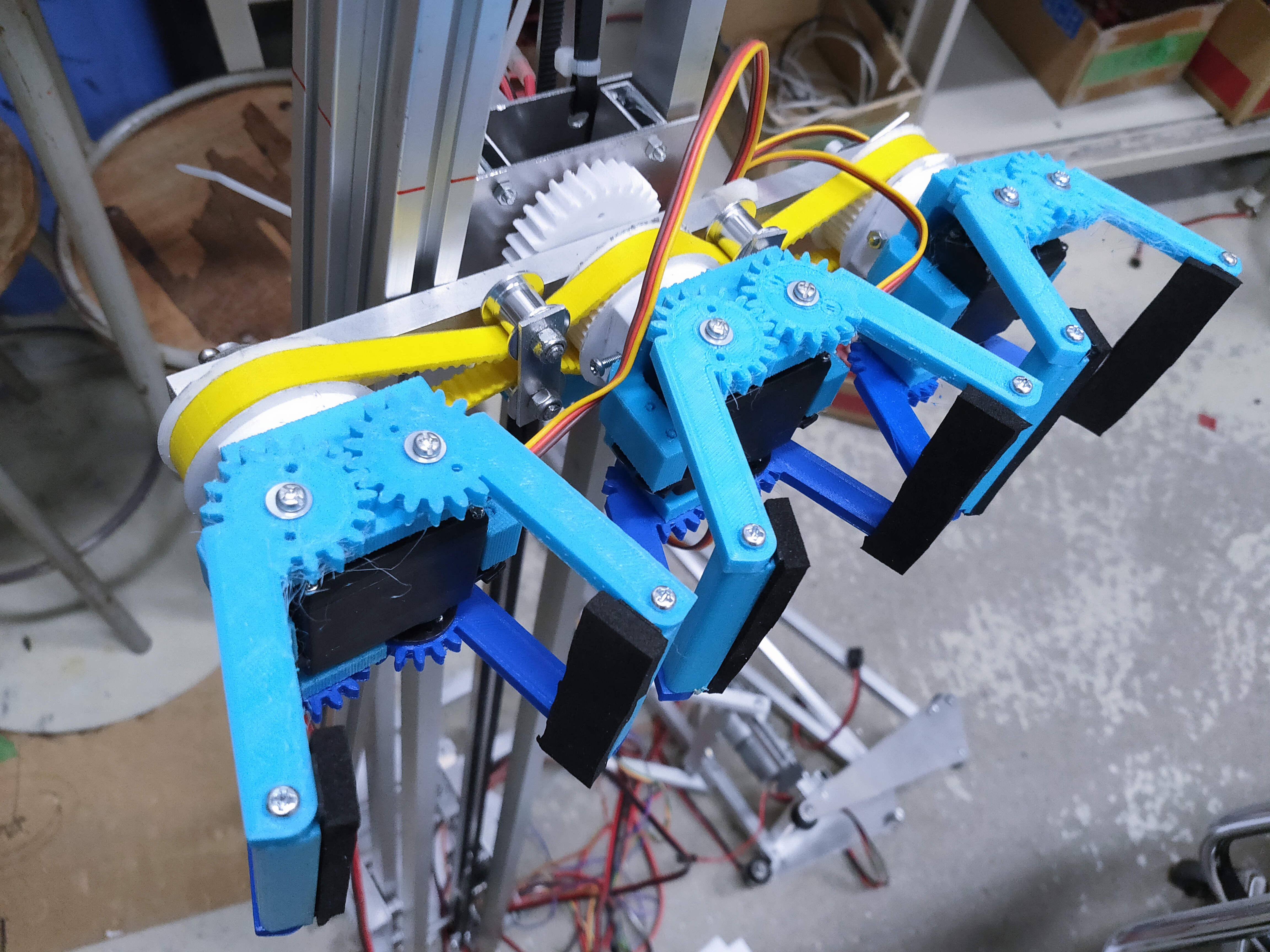

キャチロボバトルコンテスト
出場食品を傷つけずに掴み、素早く運搬するための把持機構を設計。柔らかい対象への力加減と、スピードを両立する機構に取り組む。
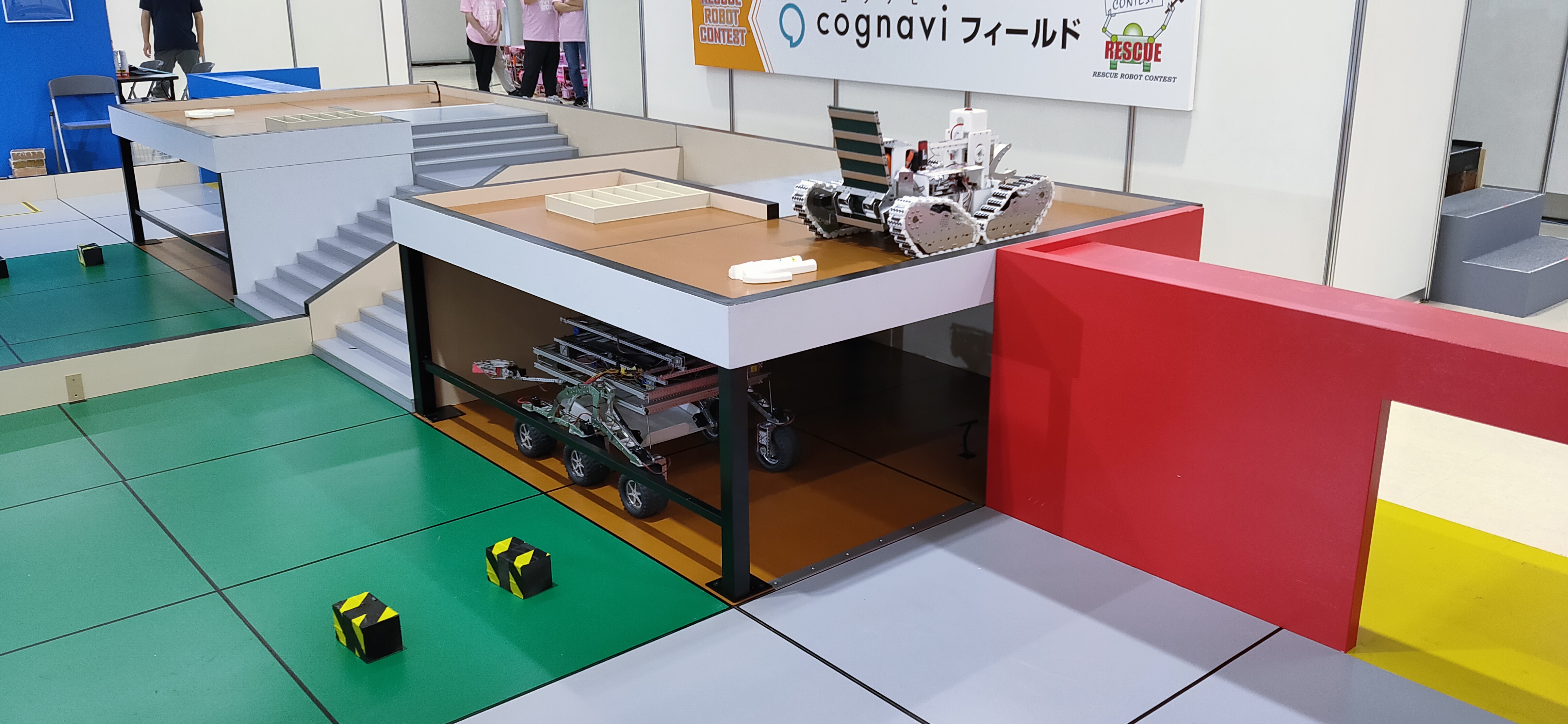
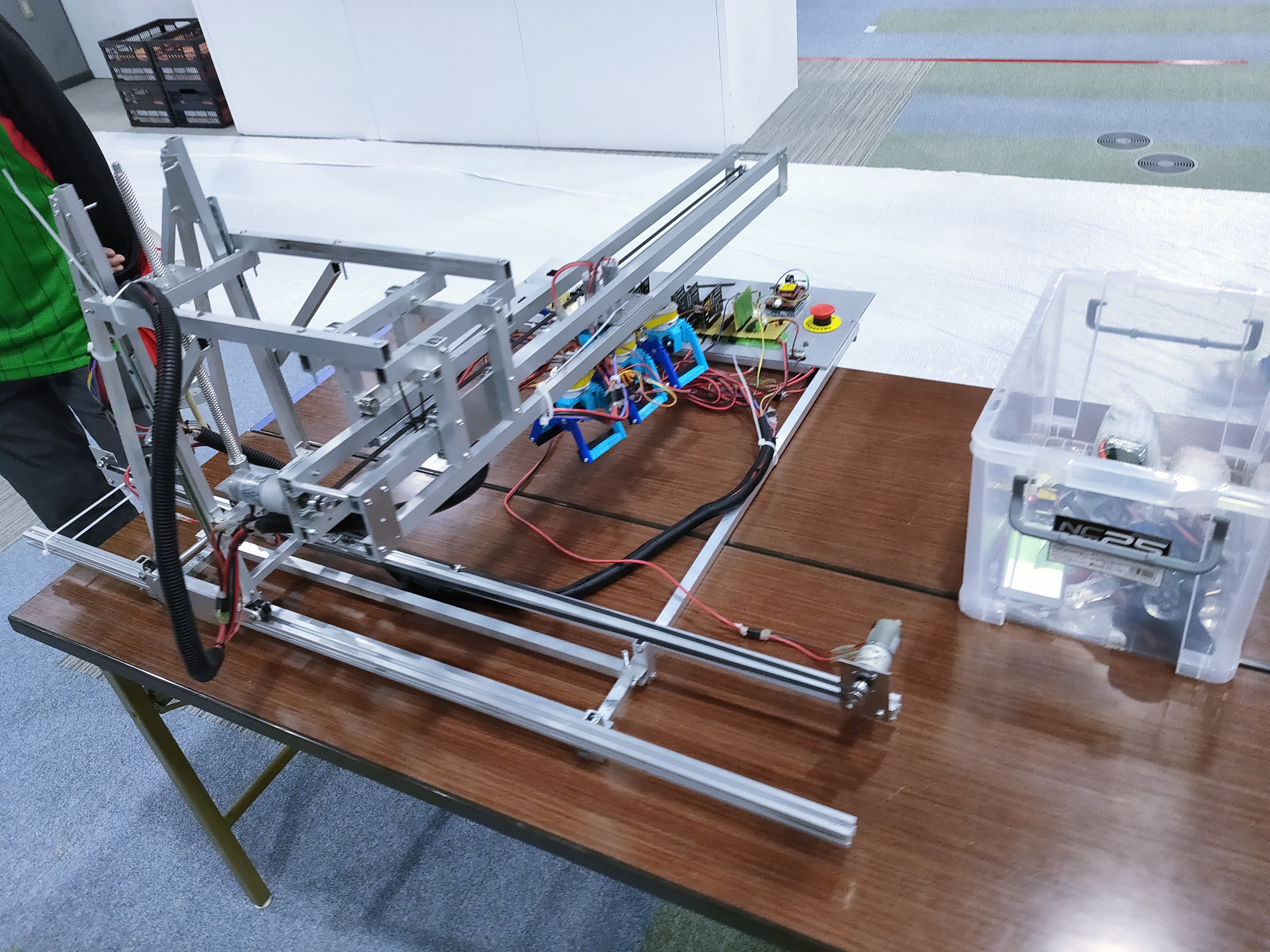
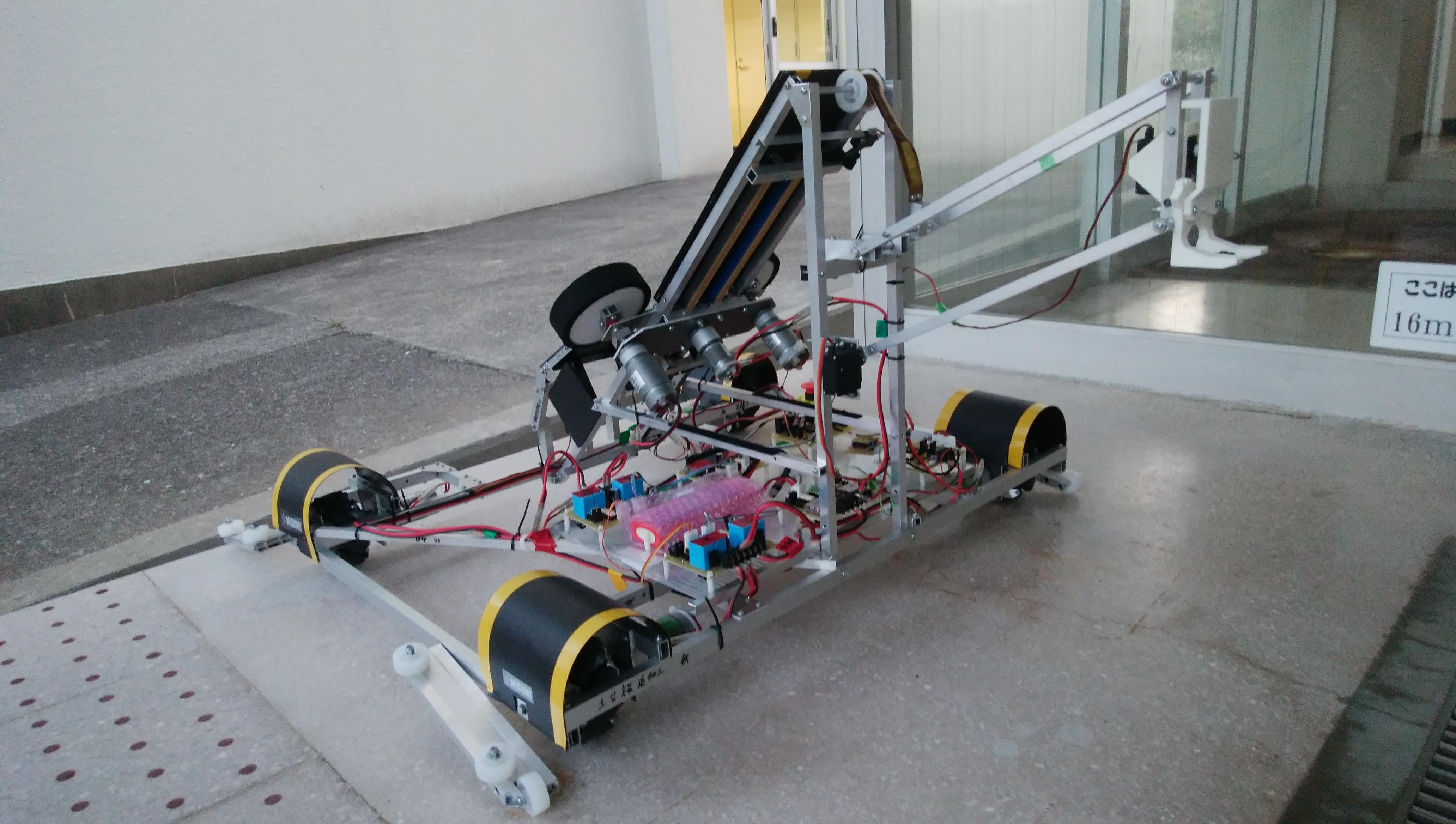
レスキューロボットコンテスト
出場被災地を想定したフィールドで要救助者を救出するロボット。走破性とアーム機構、操縦性の改善と実機調整に注力。
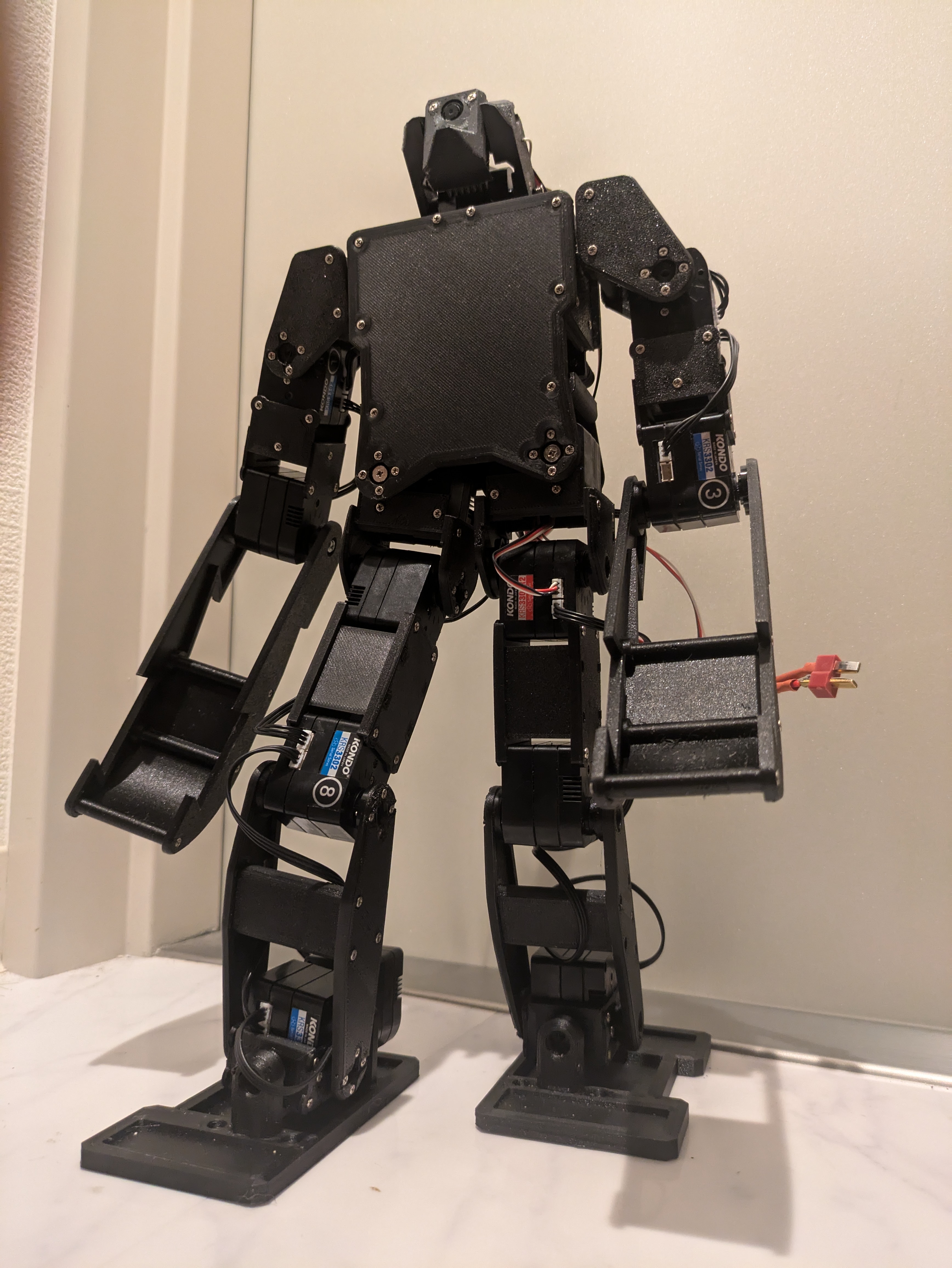
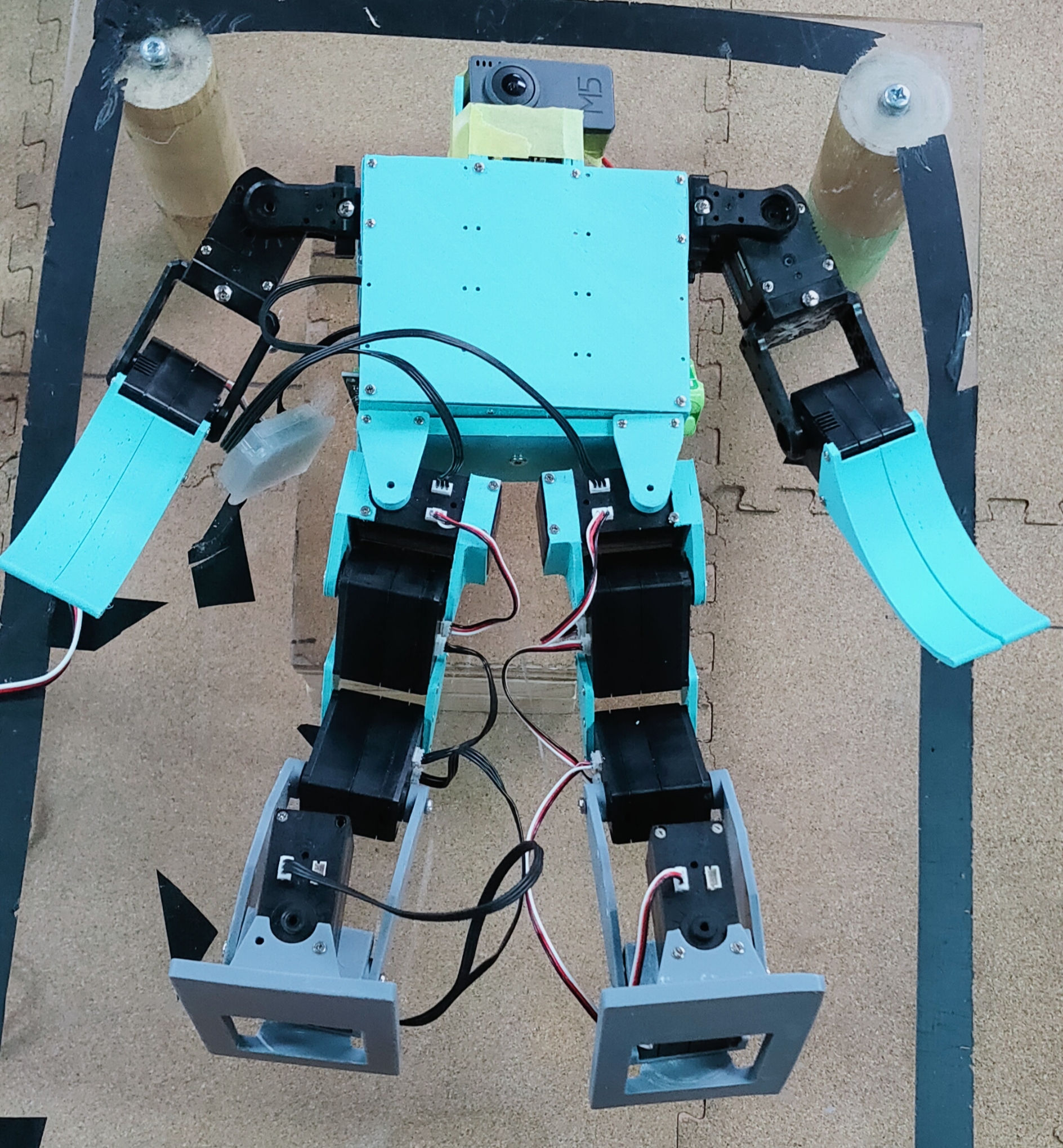
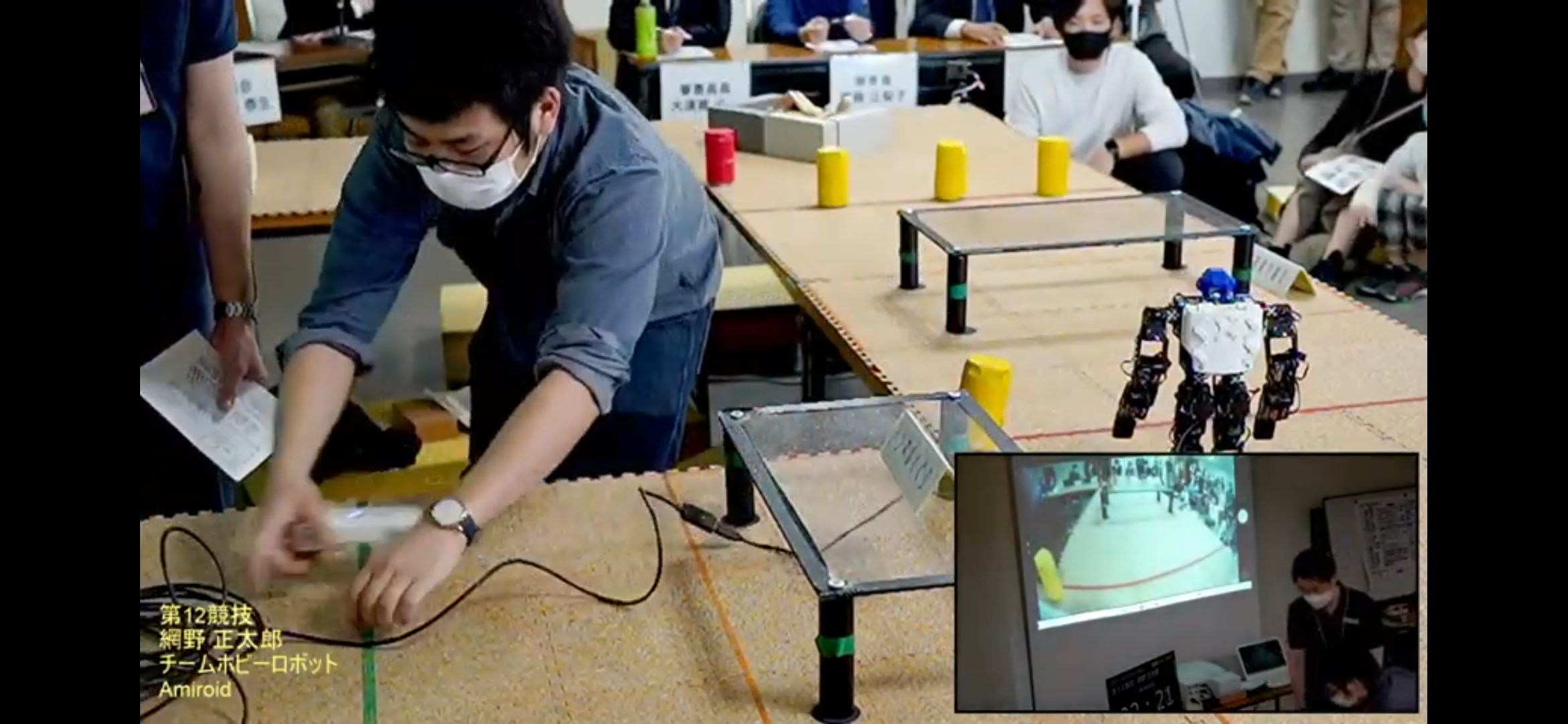

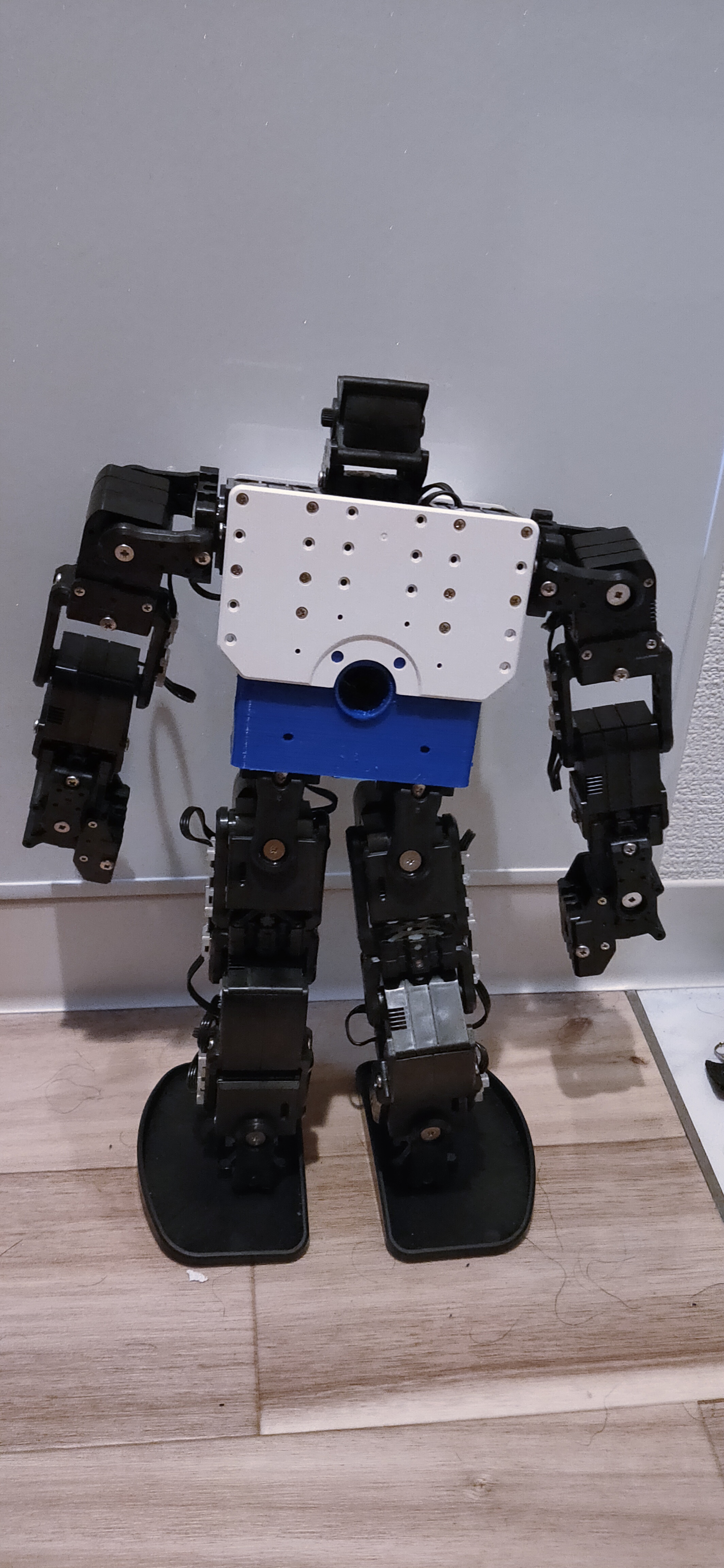
ヒト型レスキューロボットコンテスト
出場ヒト型ロボットによる救助タスクに挑戦。脚機構・上半身設計・操縦インタフェースを横断的に検討し、実機での挙動調整を重ねた。

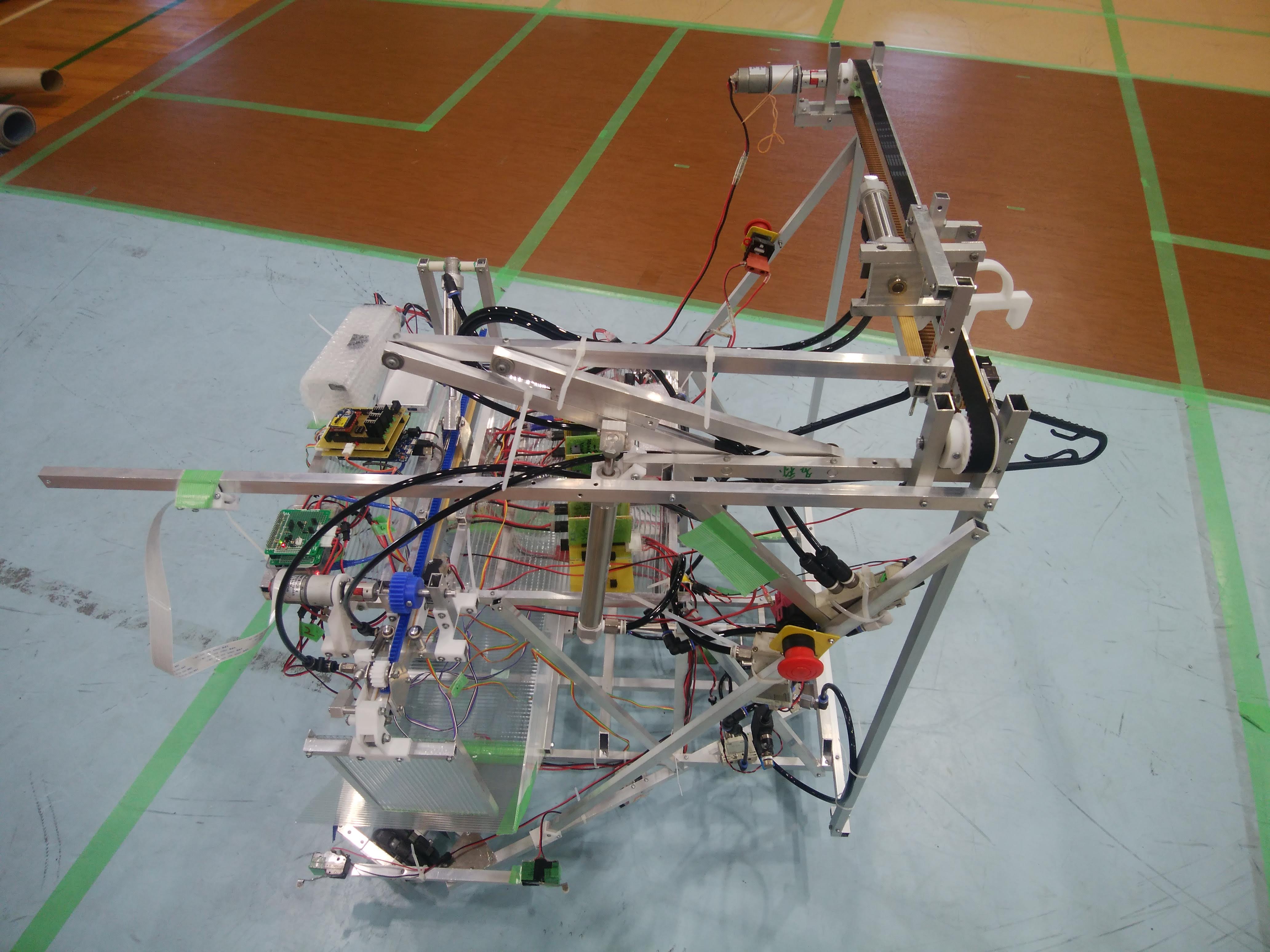
CoRE(チームホビーロボット / KINKI KNIGHTS)
出場射出機構や自動機構を中心とした競技用ロボット。装飾・外装まで含めた完成度と、本番での操縦性・実機調整にこだわって製作。
🧰 その他の製作物
コンテスト出場機以外に製作したロボット・機構・趣味の製作物などをここに掲載していきます。
学校外での合同ロボコンに参加。普段の競技とは異なる課題・ルールに合わせて機体を製作した記録。

学校外での合同ロボコンに参加。普段の競技とは異なる課題・ルールに合わせて機体を製作した記録。
📸 フォトギャラリー
2018 高専ロボコン
撮影:チームメンバー
2019 高専ロボコン「らん鳥」
撮影:チームメンバー
2020 キャチロボバトルコンテスト
撮影:チームメンバー
2021 レスキューロボットコンテスト
撮影:チームメンバー
2024 ヒト型レスコン「あみろう丸」
撮影:チームメンバー
2026 CoRE-1
撮影:チームメンバー
※ 写真は順次差し替え予定です。
📅 活動年表
和歌山高専入学。高専ロボコン和歌山高専Aチームで装飾等を担当。
高専ロボコン和歌山高専Aチームで自動機設計を担当。
高専ロボコン和歌山高専Bチーム「江楠マキナさん」が全国大会出場。装飾等を担当。
高専ロボコン和歌山高専Bチーム「らん鳥」でチームリーダー兼機械設計を担当。
高専ロボコン和歌山高専Aチーム「OGch.」で機械設計を担当。安川電機賞。
キャチロボバトルコンテスト出場。機械設計担当。ベスト8。
和歌山高専卒業。
チームホビーロボットとしてヒト型レスキューロボットコンテストに参加。Amiroid(2022)、がるー(2023)、あみろう丸(2024-2025)。
チームホビーロボットとしてレスキューロボットコンテストに参加。
KINKI KNIGHTSとしてCoRE-1に参加。操縦兼アタッカー射出メカ担当。
💡 技術テーマ別まとめ
SolidWorks を中心としたロボット機構の設計。フレーム・伝達機構・カバーを含めて、加工・組立・調整までを見据えた図面に落とし込む。
競技課題を達成するための自動機構の構想・試作・実装。センサと連動した動作を機械的にも電気的にも安定させることを重視。
キャチロボでの食品ハンドリングを起点に、対象を傷つけずに高速で扱うための把持機構を設計。素材選定と機構形状で速度と確実性を両立。
レスキュー、ヒト型レスキューでのフィールド走破・救助動作を担うロボット設計と操縦。実環境での想定外に強い機体作りを意識。
CoRE 等で使用する投擲・発射のための射出機構を設計・実装。リリース角度や初速のばらつきを抑えるための機構調整に取り組む。
本番で勝つための操縦性改善と実機調整。装飾・外装まで含めた仕上げを通して、ドライバーが扱いやすく見栄えのする機体を目指す。